Java 21 changed the concurrency story — but how close is it really to Go’s goroutines? Side-by-side code, real benchmarks, and honest trade-offs.
For years, Go’s concurrency model was the answer Java developers could never quite replicate. Goroutines were lightweight, the go keyword was effortless, and channels gave you safe communication without a lock in sight. Java, meanwhile, demanded thread pools, ExecutorService boilerplate, and careful management of a relatively small number of expensive OS threads.
Then Java 21 shipped virtual threads as a stable feature — the flagship delivery of Project Loom — and the narrative shifted. Suddenly, Java could spawn millions of lightweight threads without rewriting application logic. Blocking code was fine again. The ecosystem rejoiced. The comparisons to Go’s goroutines flooded the internet — but most of them stayed at the surface: a paragraph of theory, maybe a toy benchmark, then a vague conclusion of “it depends.”
This article goes further. We’ll compare the two models at the scheduler level, run them against the same problems in side-by-side code, look at real benchmark numbers, and map out exactly which situations favour each. By the end, you’ll have a concrete mental model — not just opinions.
The mental model: what “lightweight thread” actually means for each
Both goroutines and virtual threads solve the same root problem: OS threads are expensive. Each one reserves roughly 1–2 MB of stack memory, requires a kernel context switch when it blocks, and tops out in the low thousands before you run into resource limits. Neither Go nor modern Java wants you thinking in those terms anymore — but they arrived at their solutions differently.

The structural similarity is real — both use M:N scheduling, meaning many lightweight tasks (goroutines or virtual threads) multiplexed over a few real OS threads. However, the philosophies diverge in an important way. Go’s scheduler is baked into the language runtime and has been there since day one. Everything in the standard library is written with this model in mind. Java’s virtual threads, by contrast, were retrofitted onto a language and ecosystem that spent 25 years assuming one-thread-per-task. That heritage matters, and we’ll see exactly where it shows up.

Launching concurrent tasks: the syntax gap
The first thing that strikes Java developers coming to Go is how little ceremony the go keyword requires. Conversely, Go developers examining Java 21 are often surprised that virtual threads are simpler than they expected. Let’s compare launching the same task — a simulated I/O-bound HTTP call — in both languages.
Go goroutine + WaitGroup
package main
import (
"fmt"
"sync"
"time"
)
func fetchURL(id int, wg *sync.WaitGroup) {
defer wg.Done()
// Simulated I/O call
time.Sleep(50 * time.Millisecond)
fmt.Printf("done: %d\n", id)
}
func main() {
var wg sync.WaitGroup
for i := 0; i < 1000; i++ {
wg.Add(1)
go fetchURL(i, &wg)
}
wg.Wait()
}
Java 21 virtual threads
import java.util.concurrent.*;
public class Main {
static void fetchURL(int id) {
try {
// Simulated I/O call
Thread.sleep(50);
System.out.printf(
"done: %d%n", id);
} catch (Exception e) {}
}
public static void main(
String[] args)
throws Exception {
try (var executor =
Executors
.newVirtualThreadPerTaskExecutor()) {
for (int i = 0; i < 1000; i++) {
final int id = i;
executor.submit(
() -> fetchURL(id));
}
} // auto-close waits for all
}
}
The Go version is arguably more explicit about waiting — the WaitGroup pattern is idiomatic and clearly shows the synchronisation point. The Java version hides it in the try-with-resources block, which auto-closes the executor and waits for all tasks. Neither is objectively better; they’re different stylistic choices. Java’s is more familiar to developers who already know the ExecutorService API.
The key point is that in both cases, you’re writing blocking, sequential-looking code. No callbacks, no CompletableFuture chains, no .then(). That convergence — linear code that actually scales — is the shared breakthrough between the two models.
Communication: channels vs. structured concurrency
This is where the philosophies diverge most visibly. Go’s answer to inter-goroutine communication is channels — typed, blocking, composable queues with a syntax that’s part of the language itself. Java 21 introduced Structured Concurrency via StructuredTaskScope (currently in preview), which takes a different approach: rather than piping data between tasks, it organises concurrent sub-tasks as a single unit of work with controlled lifetime and error propagation.
Go channels + select
func main() {
results := make(chan string, 2)
go func() {
results <- callServiceA()
}()
go func() {
results <- callServiceB()
}()
// Collect both results
r1 := <-results
r2 := <-results
fmt.Println(r1, r2)
}
// select: wait for first result
select {
case r := <-results:
fmt.Println("fastest:", r)
case <-time.After(2 * time.Second):
fmt.Println("timed out")
}
Java 21+StructuredTaskScope
// --enable-preview required (Java 21-24)
// Finalised in Java 25 via JEP 506
try (var scope =
new StructuredTaskScope
.ShutdownOnSuccess()) {
scope.fork(() -> callServiceA());
scope.fork(() -> callServiceB());
scope.join();
// First success wins, others cancelled
String result = scope.result();
System.out.println(result);
}
Go’s select statement is notably more concise for “race two tasks and take the winner” patterns — a single construct handles fan-in, timeouts, and cancellation signals simultaneously. On the other hand, Java’s StructuredTaskScope makes the lifetime of concurrent tasks explicit and enforced: when the try block exits, all forked tasks are guaranteed to have completed or been cancelled. There are no orphaned threads. The Java 21 concurrency story still suffers from StructuredTaskScope being in preview — it only reached its final API form in Java 25 via JEP 506.
Key Difference
Go channels are a communication primitive — they move data between goroutines. Java’s StructuredTaskScope is a lifetime management primitive — it ensures related tasks complete together and errors propagate cleanly. These are complementary ideas, not direct alternatives. Go has no built-in equivalent to structured task lifetime; Java has no built-in equivalent to typed channels. Both ecosystems have third-party solutions for the missing half.
Benchmark: I/O-bound concurrency at scale
Theory aside, let’s look at what the numbers actually show. The most widely replicated benchmark scenario — and the one most representative of real microservice workloads — is high-concurrency I/O: many tasks blocking on network calls, database queries, or file operations simultaneously.
The figures below are drawn from several independent benchmark studies, including a concurrency comparison by Manoj Swain (August 2025) that ran identical HTTP-fetching workloads on the same hardware using Go and Java 21, and the JCG 2026 microservices benchmark using a product catalog API under 500 concurrent users on AWS Fargate.
Throughput vs. Concurrent Tasks: Go vs. Java Virtual Threads (I/O-Bound)

Memory Usage at Scale (I/O-Bound Concurrent Tasks)
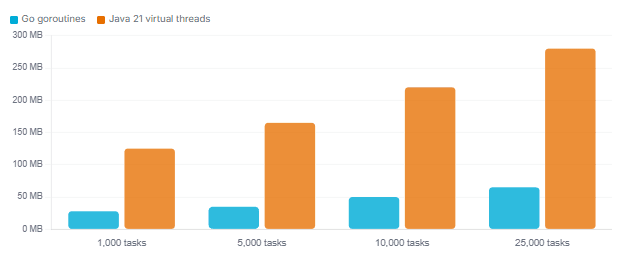
The pattern is consistent across studies. Go outperforms Java virtual threads on throughput by roughly 40–60% in I/O-bound scenarios, and uses 4–5× less memory. As task count rises, Java’s GC pressure becomes visible — the drop in throughput at 25,000 concurrent tasks reflects GC pauses kicking in, something Go’s simpler GC handles more gracefully at this scale.
However, it’s equally important to note what these benchmarks do not capture. They measure a synthetic I/O workload, not a real enterprise application with business logic, complex object graphs, and JVM JIT optimisations that kick in after warm-up. A well-tuned Spring Boot application running on Java 21 with virtual threads and ZGC will perform very differently from a cold JVM running a toy benchmark.
The JVM needs approximately 30–45 seconds of JIT compilation to reach peak throughput after startup. Most short benchmarks measure the JVM during or before this warm-up period, which systematically disadvantages Java. Go, by contrast, reaches full throughput within milliseconds of starting. For long-lived services (most enterprise workloads), the startup gap shrinks significantly. Project Leyden’s AOT cache in Java 25 cuts warm-up by 15–25%, closing this further.
The pinning problem — Java’s most important caveat
Virtual threads in Java are not a drop-in replacement for platform threads in all cases. The single most important limitation — and the one that caused a real production incident at Netflix — is thread pinning. When a virtual thread enters a synchronized block and then blocks on I/O, the virtual thread gets pinned to its carrier thread — the carrier can’t be freed to run other virtual threads. This eliminates the throughput benefit entirely for that carrier, and under high load can deadlock the entire carrier pool.
Java — pinning trap (pre-JDK 24)
// This pins the carrier thread in Java 21–23
synchronized (lock) {
// Blocking I/O inside synchronized = carrier pinning
String result = httpClient.send(request); // carrier stuck!
}
// Fix: use ReentrantLock instead of synchronized
lock.lock();
try {
String result = httpClient.send(request); // carrier free to work
} finally {
lock.unlock();
}
The good news is that JEP 491, shipped in JDK 24, fundamentally fixed this. The JVM monitor ownership system was rewritten to track virtual thread identity rather than OS carrier thread identity, which means virtual threads can now block inside synchronized without pinning the carrier. This is a complete solution — not a workaround. If you’re on Java 24 or later, the pinning problem is resolved. If you’re on Java 21–23, replacing synchronized with ReentrantLock is the recommended mitigation.
Go has no equivalent problem. Goroutines can block anywhere — on channels, on system calls, on mutexes — and the runtime handles preemption and rescheduling automatically. Since Go’s scheduler was designed with goroutines as the primary abstraction from the beginning, there is no legacy thread model creating these edge cases.
Side-by-side: the full picture
| Dimension | Go Goroutines | Java Virtual Threads |
|---|---|---|
| Initial overhead | 2 KB stack (grows dynamically) | ~300 bytes heap overhead |
| Scheduler | G-M-P model; work-stealing; built-in since Go 1.0 | ForkJoinPool over carrier threads; bolted onto JVM |
| Communication | Channels + select (first-class language feature) | StructuredTaskScope (preview through Java 24; final in Java 25) |
| Pinning / blocking | No pinning — goroutines block freely anywhere | Fixed in JDK 24 (JEP 491); use ReentrantLock on JDK 21–23 |
| Throughput (I/O) | Faster ~40–60% higher in benchmarks | Significantly improved; narrows gap on warm JVM |
| Memory footprint | Lower ~4–5× less than Java virtual threads at scale | JVM base footprint (~50–70 MB) is unavoidable overhead |
| Startup time | Near-instant; sub-millisecond to full throughput | 30–45s JIT warm-up for peak; AOT cache (Java 25) cuts by 15–25% |
| Backward compatibility | N/A — Go has always been goroutine-based | Strength Existing blocking code works unchanged |
| Ecosystem | Concurrency-native stdlib; net/http, database/sql etc. goroutine-ready | Strength Vast ecosystem; Spring Boot, Hibernate, JDBC all updated |
| Structured concurrency | No built-in; idiom via goroutines + WaitGroup/channels | StructuredTaskScope — explicit lifetime management, finalised Java 25 |
| CPU-bound tasks | Work-stealing distributes naturally across cores | Virtual threads add no benefit for CPU-bound; use parallel streams |
| ThreadLocal / context | No ThreadLocal; context passed explicitly or via context.Context | ThreadLocal works but scales poorly; ScopedValue (Java 25) is the fix |
When to use which: the honest decision guide
The answer is not “Go is faster so always use Go.” Throughput and memory numbers matter, but so does the size of your team’s experience, your existing codebase, your ecosystem dependencies, and whether your bottleneck is actually concurrency at all. Here’s a clear-eyed breakdown.
Reach for Go when…
Clear Go wins
- Building a new service from scratch where concurrency is the primary concern
- CLI tools, infrastructure daemons, or Kubernetes operators where startup latency matters
- High-density deployments where pod memory footprint directly costs money
- Services handling tens of thousands of persistent connections (proxies, WebSocket servers)
- Teams already comfortable with Go’s explicitness and error-handling idioms
Clear Java wins
- Migrating an existing Spring Boot codebase — virtual threads drop in with almost no refactoring
- Complex domain logic benefiting from Java’s mature OOP tooling, generics, and ecosystem
- Integrations with libraries that only exist in the JVM ecosystem (Hibernate, Kafka client, etc.)
- Teams with deep Java expertise — knowledge worth more than a theoretical throughput gap
- Long-lived services on Java 21+ where JIT warm-up cost amortises over days
The pragmatic middle
The most successful architecture pattern emerging in 2025–2026 is hybrid: Java for complex business logic and stateful domain services, Go for edge proxies, infrastructure tooling, and high-throughput internal APIs. The two interoperate seamlessly over HTTP and gRPC. The biggest companies — Google, Netflix, Cloudflare — all run this kind of polyglot architecture. The question isn’t “which language wins” but “which tool is right for this layer.”
If you’re migrating Java to virtual threads: what actually changes
One of virtual threads’ most underrated strengths is migration cost. For the vast majority of Spring Boot applications, switching to virtual threads requires changing roughly two lines of configuration, not rewriting application logic. Blocking code — JDBC queries, RestTemplate calls, file I/O — works exactly as written. The JVM handles the rest.
Spring Boot — enabling virtual threads (Java 21+)
// application.properties — that's genuinely it for most apps
spring.threads.virtual.enabled=true
// Or in Java config:
@Bean
public TomcatProtocolHandlerCustomizer protocolHandlerCustomizer() {
return protocolHandler ->
protocolHandler.setExecutor(
Executors.newVirtualThreadPerTaskExecutor()
);
}
Go has no equivalent migration story because there is nothing to migrate from — goroutines were always the model. That’s both an advantage (consistency) and a constraint (the Go concurrency idioms must be learned from scratch). The explicit tradeoff is real: Go’s model requires more learning upfront, but Java’s model requires navigating years of legacy concurrency APIs that co-exist alongside the new ones.
What we’ve covered
Here’s the full comparison distilled into the things that actually matter when making a decision:
- Both Go goroutines and Java virtual threads solve the M:N scheduling problem — mapping many lightweight tasks onto a small pool of OS threads — but Go’s scheduler was designed for this from day one, while Java’s was retrofitted onto a 25-year-old platform-thread model.
- Goroutines start at 2 KB and virtual threads at ~300 bytes heap overhead; both leave traditional OS threads’ 1–2 MB stacks far behind, and virtual threads use ~123× less total memory per task than platform threads.
- Go’s
gokeyword and channels give it a conciseness advantage for communication patterns; Java’sStructuredTaskScopegives it a lifetime-management advantage for complex fan-out/fan-in tasks. Neither has a complete answer to the other’s primitive. - In I/O-bound benchmarks, Go consistently outperforms Java virtual threads by 40–60% on throughput and uses 4–5× less memory — but these benchmarks usually measure the JVM before JIT warm-up, which systematically disadvantages Java for long-lived services.
- The pinning problem — where
synchronizedblocks caused virtual threads to be stuck on carrier threads — was completely resolved in JDK 24 via JEP 491. If you’re on Java 21–23, replacesynchronizedwithReentrantLockin I/O-heavy paths. - Migrating an existing Spring Boot app to virtual threads takes as little as one configuration property. This near-zero migration cost is a genuine advantage that raw benchmark numbers don’t capture.
