Apollo自动驾驶5大核心模块详解:定位、感知、规划、预测、控制
 项目地址: https://gitcode.com/gh_mirrors/di/dig-into-apollo
项目地址: https://gitcode.com/gh_mirrors/di/dig-into-apollo Apollo自动驾驶系统是一个功能强大的开源平台,其中定位、感知、规划、预测和控制五大核心模块协同工作,实现了车辆的自主行驶。本文将详细解析这五大模块的功能和工作原理,帮助初学者快速了解Apollo自动驾驶技术的核心架构。
一、定位模块:自动驾驶的"导航仪" 🧭
定位模块是自动驾驶汽车的"眼睛",它通过多种传感器数据融合,精确确定车辆在地图上的位置。Apollo定位模块主要实现了RTK、NDT和MSF三种定位方法,以应对不同场景的需求。
RTK(实时动态差分)定位通过接收GPS和IMU(惯性测量单元)数据,实现厘米级的定位精度。NDT(正态分布变换)定位则利用激光雷达点云与高精度地图的匹配,在GPS信号不佳的环境中仍能保持较高的定位准确性。MSF(多传感器融合)定位则结合多种传感器数据,进一步提高定位的鲁棒性。

定位模块的核心实现位于modules/localization/目录下,其中"rtk_localization_component.cc"注册为标准的cyber模块,负责接收GPS和IMU消息并触发定位计算。
二、感知模块:自动驾驶的"感官系统" 👀
感知模块如同自动驾驶汽车的"五官",它通过处理来自摄像头、激光雷达、毫米波雷达等多种传感器的数据,实现对周围环境的精确感知。
Apollo感知模块的工作流程可以分为数据输入、特征提取、目标检测和数据融合几个阶段。首先,传感器数据经过预处理后送入深度学习模型进行特征提取和目标检测。然后,来自不同传感器的检测结果通过数据融合技术进行整合,最终生成统一的环境感知结果。

感知模块的入口位于modules/perception/production/目录,通过加载对应的DAG文件启动各个子模块。整个感知系统由多个子模块组成,包括摄像头感知、激光雷达感知、毫米波雷达感知以及传感器融合等,最终输出障碍物、车道线、交通信号灯等关键信息。
三、规划模块:自动驾驶的"大脑决策" 🧠
规划模块是自动驾驶汽车的"大脑",它根据感知模块提供的环境信息和定位模块提供的车辆位置,为车辆规划出一条安全、高效的行驶路径。
Apollo规划模块的轨迹规划可以分为长期规划和短期规划。长期规划主要基于导航信息,规划从起点到目的地的全局路径。短期规划则根据当前路况,实时调整车辆的行驶轨迹,包括加速、减速、变道、超车等决策。

规划模块的核心实现位于modules/planning/目录,其中参考线生成、行为决策和轨迹优化是三个关键环节。参考线生成模块根据导航路径和当前路况生成一条合理的行驶参考线;行为决策模块根据感知结果和交通规则做出行驶决策;轨迹优化模块则根据车辆动力学模型,优化出一条平滑、安全的行驶轨迹。
四、预测模块:自动驾驶的"未来洞察力" 🔮
预测模块是自动驾驶汽车的"预言家",它根据感知模块提供的障碍物信息,预测这些障碍物在未来一段时间内的运动轨迹,为规划模块提供重要的决策依据。
Apollo预测模块采用了基于深度学习的方法,通过分析障碍物的历史轨迹、当前速度和加速度等信息,结合道路拓扑结构和交通规则,预测障碍物未来的位置和运动状态。预测结果包括障碍物的位置、速度、加速度以及可能的行为(如直行、左转、右转等)。

预测模块的入口位于modules/prediction/prediction_component.cc,它接收感知模块输出的障碍物信息,经过处理后生成预测结果。预测模块采用了消息触发模式,每当接收到新的感知数据时就会执行预测计算。
五、控制模块:自动驾驶的"执行系统" 🕹️
控制模块是自动驾驶汽车的"手脚",它根据规划模块生成的行驶轨迹,计算出车辆的油门、刹车和方向盘控制信号,使车辆按照规划的轨迹行驶。
Apollo控制模块主要采用PID(比例-积分-微分)控制和模型预测控制两种方法。PID控制是一种经典的控制算法,通过比较实际轨迹和期望轨迹的偏差,实时调整控制量。模型预测控制则基于车辆动力学模型,预测未来一段时间内的车辆状态,并优化控制策略。
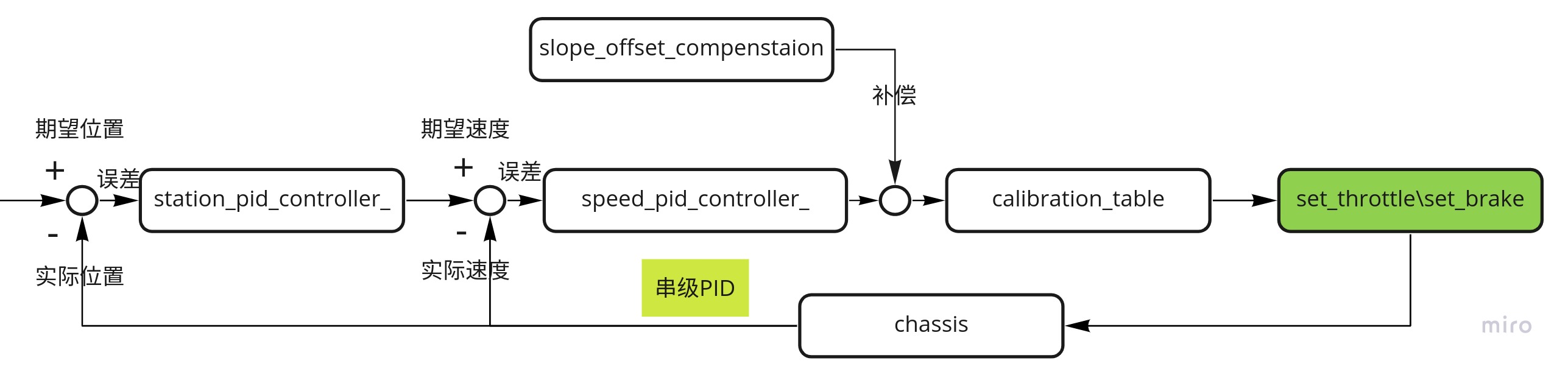
控制模块的核心实现位于modules/control/目录,其中"control_component.cc"是控制模块的入口文件。控制模块接收规划模块输出的行驶轨迹,经过轨迹跟随和速度控制两个环节,最终生成油门、刹车和方向盘控制信号,通过CAN总线发送给车辆执行器。
总结
Apollo自动驾驶系统的五大核心模块相互协作,共同实现了车辆的自主行驶。定位模块提供精确的位置信息,感知模块感知周围环境,预测模块预测障碍物运动,规划模块制定行驶策略,控制模块执行驾驶操作。这五大模块的紧密配合,使得Apollo能够在复杂的交通环境中安全、高效地行驶。
如果您想深入学习Apollo自动驾驶技术,可以通过以下步骤获取Apollo学习笔记项目:
git clone https://gitcode.com/gh_mirrors/di/dig-into-apollo
项目中包含了丰富的学习资料和代码解析,帮助您快速掌握Apollo自动驾驶技术的核心知识。
创作声明:本文部分内容由AI辅助生成(AIGC),仅供参考







